As the name suggests, the Service Bus establishes a
platform-agnostic messaging infrastructure. It essentially provides a
foundation of connectivity fabric that supports a variety of
inter-service messaging frameworks and patterns.
Connectivity Fabric
The Service Bus acts as a
rendezvous destination on the Internet where services and their
consumers can both meet and interact. As shown in Figure 1,
a service first connects to the Service Bus through an outbound port
(or by projecting itself onto the Service Bus), and then establishes a
bi-directional socket connection (via TCP or HTTP). This connection
session is published on the Service Bus, thereby making it a
discoverable service endpoint at a particular rendezvous address.
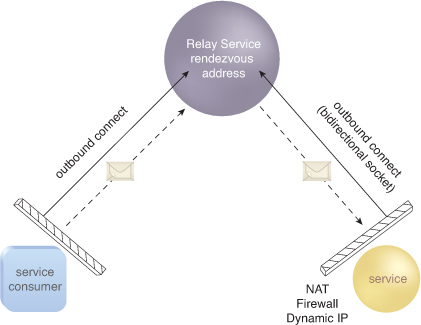
A service consumer does the
same by establishing a connection through an outbound port to interact
with the service behind the rendezvous address. Once these network
connections are established, the Service Bus can act as an intermediary
and relay messages between the service and the consumer program. The
service consumer is unaware of the service’s actual location; it only
needs to know about the rendezvous address that was published and made
discoverable on the Service Bus.
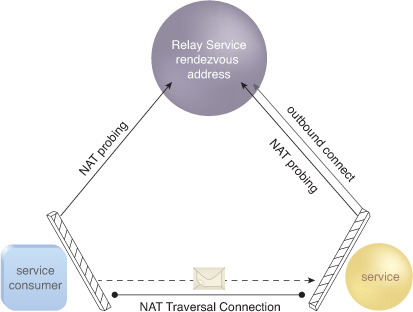
The Service Bus also
provides a hybrid connectivity mode, which enables a direct,
peer-to-peer connection between the services and consumers. In this
case, the Service Bus acts as a match-maker by using a mutual port
prediction algorithm based on probing information from any services and
consumer programs currently connected to the Service Bus service.
If a direct connection is
possible, the Service Bus provides the logistics to both the services
and consumers, which then attempt to establish the connections and
bypass the Service Bus for cross-service interactions. Once these
programs are communicating directly, the Service Bus is no longer
involved. Direct connections can benefit from improved performance and
throughput, and are facilitated transparently (Figure 2).
With
the outbound-rendezvous relayed connectivity model, services don’t need
to be concerned with responding to inbound connections and making
specific changes to an on-premise environment as long as the Service Bus
is accessible from the service. This connectivity model can also be
found in other architectures, such as instant messaging services,
voice-over-IP systems, and peer-to-peer file sharing services.
Direct connectivity can be used to support many inter-service messaging patterns for interactions, including:
bi-directional messaging
request-response
one-way unicast
multicast messaging
publish-subscribe
asynchronous messaging
buffered delivery
Message Buffers
The relayed and
hybrid connectivity models leverage WCF relay binding. If either the
consumer or the service is not using WCF then all communication will
need to be routed through the Service Bus itself. In this case, the
Service Bus offers message buffers that provide persistent, asynchronous
messaging and support open interoperability with any program capable of
making REST calls over HTTP(S).
Service Bus message
buffers provide a data structure with first-in, first-out (FIFO)
semantics. Messages are held in a buffer until the intended message
subscriber pulls them down. The message buffer allows a service (acting
as the service producer) to periodically connect to the Service Bus and
asynchronously poll for incoming messages through simple HTTP(S)
requests (as opposed to persistent TCP connections). Similarly, a
service consumer can asynchronously publish messages via HTTP(S) to the
rendezvous address within the Service Bus namespace, and then return to
poll for any expected response messages.
The subscribing service
controls the message buffer’s lifetime and when a message buffer
expires, it essentially disappears. When a subscribing service creates a
new message buffer, it uses a message buffer policy to specify how long
the buffer can live after the
last time it is polled for messages. This time can span from 1 to 10
minutes. Every time the service polls the buffer, the timer is reset,
but once it counts down to 0, the Service Bus essentially deletes the
buffer and everything in it (regardless of whether there are active
message publishers still pushing messages to the buffer).
Its limited lifespan is a
characteristic that distinguishes a message buffer from a message queue.
Another distinction pertains to durability. If a non-empty queue node
were to crash, any messages within it will still be available after the
node is brought back up. Service Bus message buffers have no such
guarantees. If a node goes down, all message data is lost, although the
buffer’s metadata will remain. When the message buffer is brought back
online it will be empty.
It can be helpful to view a
message buffer as a short-term cache between endpoints or even between a
cloud-based projection of an application’s (receiver’s) TCP buffer.
Message buffers have specific usage quotas, as listed in Table 1.
Table 1. Usage quotas for message buffers.
| Quota Name | Quota Value |
|---|
| number of simultaneous connections (senders) open per service namespace | 100 |
| number of simultaneous listeners per service namespace | 25 |
| number of operations per second (does not apply to NetTcp bindings) | 10000 |
| number of message buffers per solution namespace | 1000 |
| maximum message (in a message buffer) size | 64KB |
| total capacity of a single message buffer | 3MB |
Service Registry
The Service Bus provides a
service registry for publishing and discovering service endpoint
references using a structured naming system. It exposes a namespace’s
endpoints through a linked tree of Atom feeds. Service consumers can
browse the registry by issuing HTTP GET requests to base addresses. The
service endpoints published in the service registry use a global forest
of hierarchical namespaces that are DNS and transport independent.
The Service Bus names are projected onto URIs in the following format:
<serviceNamespace>.servicebus.windows.net/<name>/<name>/...
At its core, the
Service Bus namespace is a federated, hierarchical service registry with
a structure dictated and owned by “the project.” The difference between
the Service Bus namespace and a “classic” service registry system (such
as DNS or UDDI or LDAP) is that services or messaging primitives are
generally not only referenced by the registry. Instead, they are
projected straight into the registry so that your consumers can interact
with the registry (and those services or messaging primitives projected
into the registry) using similar or identical programming interfaces
and within the scope of a unified namespace.
In other words, this naming
system provides a logical abstraction over the physical details of
services projecting service endpoints onto the Service Bus. For example,
a given solution’s namespace can have names that represent services
implemented by multiple project teams using any platform and deployed in
separate locations (on-premise or cloud-based).
